


巧妙地设计为
保护海底油田:川崎的AUV
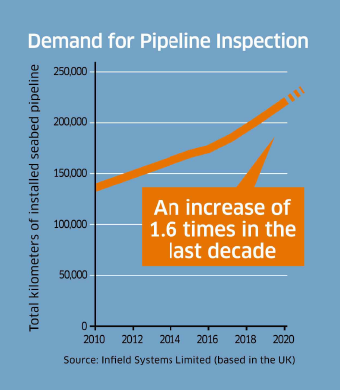
随着海底油田的发展继续增长,维护的效率
管道的检查可以在水下或海底上进行,正在成为一个主要的
挑战。Kawasaki一直是自主水下发展的全球性先驱
用于这些目的的车辆(AUV),并解决挑战,它计划商业推出
新的AUV在2021年,任务是保护这种水下能源的使命。
-

- Noriyuki Okaya.
-
经理
AUV部门,神户造船厂
船舶和离岸结构公司
-

- Kosuke Masuda
-
助理经理
AUV部门,神户造船厂
船舶和离岸结构公司


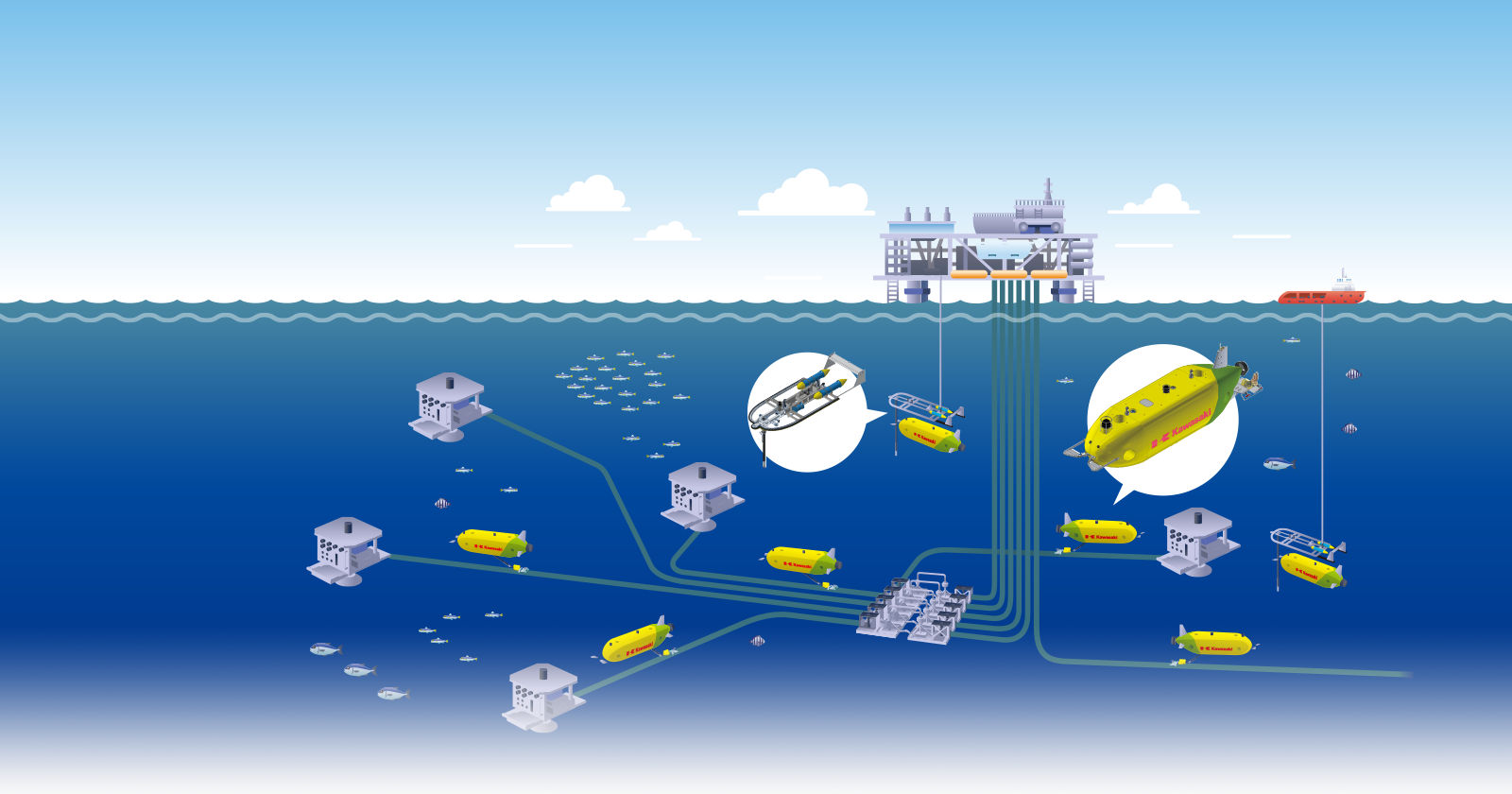
自主维护/
检查油田设施
位于400米深处
在世界的主要能量中,30%是油,20%是天然气。国际能源机构(IEA)预测石油需求将保持强劲,即使在高达2040年的期间,仍有30%的主要能源仍将由石油提供。
然而,最近油田位置的趋势发生了变化,从更深的水域中提取的石油量一直在增加。根据IEA的数据,海底油田每天生产270万桶石油,占全球石油产量的30%。该机构还估计海底油田的探明储量达2600亿桶,或全球总储量的15%,但由于陆上和浅海石油生产一直在下降,这是预测,生产从油田位于400米的深度或更多将会增加。
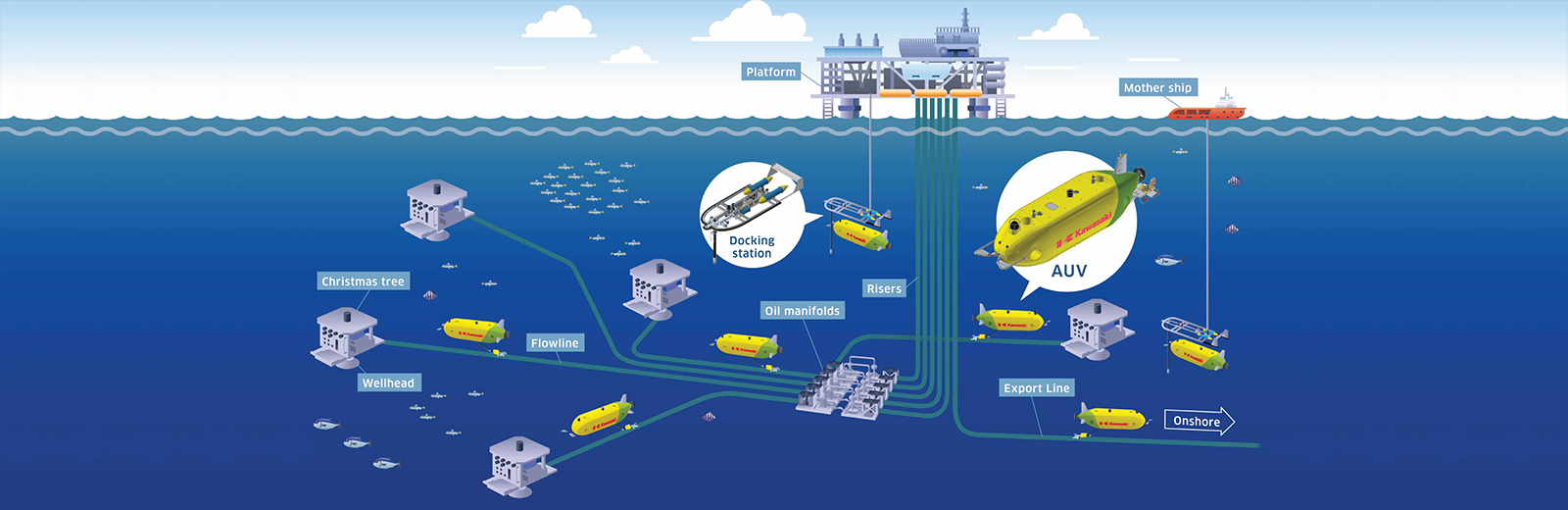
在一个海上油田,我们看到的是一个“钻井井架在平台上直立的平台”,大多数人会认为井架平台站在一个井里,从井架钻了海底后抽了海底油平台。实际上,尽管有变化,海底油被吸入海底,并且更具代表性的图片将是八达通们将其悬从大海的章鱼,其触手的末端紧贴到海底。
从海底散落的井中的原油被泵起来,通过海上的管道或海底送到平台。然而,这些管道容易受到各种因素的影响:由于海水或埋在海床中,它们可以变得腐蚀,如果下面的床变得侵蚀,它们可能会悬浮在海里。虽然经常维护和检查是维持海底油提取不可或缺的,但潜水员只能在相对较浅的水中运行,深度为300米,这是一个危险的使命。无人驾驶潜水线(机器人),最受欢迎的是目前是远程操作车辆(ROVS),开发用于取代这些潜水员。
由连接到母船的电缆供电,ROV可以实时运行。然而,它们只能由熟练和专用的运营商操纵,并且操作范围仅限于母舰附近的区域。因为这些因素使利用ROVS成本高昂,因此AUV现在被视为替代的“海底油田的监护人”。
AUVS不需要电缆,并且,尚未指示的名称,即使在深水中也能执行任务,而无需将其被系在母舰上所施加的操作限制。缺点是AUV的电源有限,并且需要复杂的控制技术来使它们能够执行复杂的任务。川崎突破了这些技术挑战,并开发了一种用于海底油田维修的创新商业AUV。
2020年6月20日,在兵库县的Awaji岛海岸,公司成功完成了AUV与机器人手臂的AUV检查海底管道的演示测试。测试的巨大成功表明它的商业化正在快速接近。

检查20公里的管道
在最大深度
3000米的单一潜水
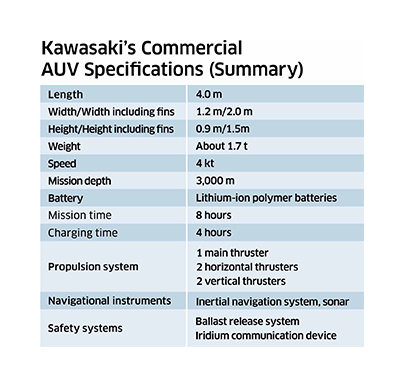
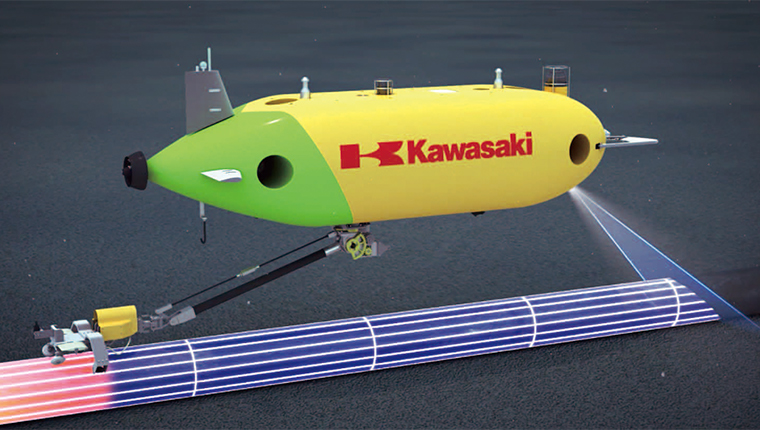
川崎重工计划在2021年实现商业化的AUV是长约4米、宽1.2米、高0.9米的流线型圆形末端车辆。它在水下以4 kt (1kt = 1.852 km/h)的速度移动,利用传感器定位管道,使机器人手臂能够接触到管道。一个用于检测的传感器安装在手臂的顶端,从管道收集各种数据。
当充满电时,这种AUV可以在水下运行约8小时,以1.5千克的速度进行检查,这意味着它能够在单一潜水中检查超过20公里的管道。在任务之后,它将在悬挂站的扩展坞停靠,悬挂在母舰上,并在将收集的数据转移到船上时开始给电池充电。四小时后,充电完成,AUV可以返回其海底任务。与通过电缆连接到母线的ROV相比,AUV可以在没有这种约束的情况下运行,灵活地提供AUV和船舶,这是其突出的优势之一。

虽然美国和欧洲公司开发的巡航型AUV用于海底勘探,但海上油田AUV的管道维护和检查需要完全不同的能力。它应该能够接近管道,自动跟踪它,检查它,并有效地收集数据。这些运营要求AUV清除以下主要技术挑战:1。一个能够在深海中抵御巨大水压的身体,2.手段接收电源,3.自主导航可控性,4.能力准确收集维护数据管理。
川崎公司的商用AUV设计用于水下3000米的航行,这将给AUV施加30兆帕斯卡(MPa)的压力,或给1米× 1米的区域施加3000吨的负载。为了解决这些挑战,我们使用了川崎的潜水技术,其中包括使用抗水压和防腐组件。
一流的对接站
确保操作员安全
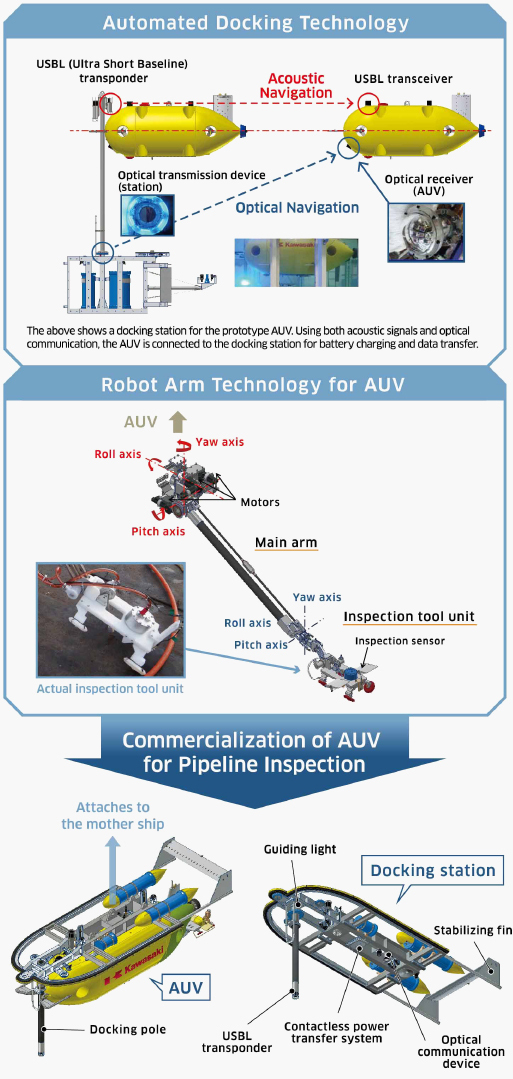
为了为AUV提供电力,川崎开发了一种全新的对接站法。Commenting on the idea behind the development, Noriyuki Okaya, Manager of the AUV Department at Kawasaki’s Ship & Offshore Structure Company, says, “The most dangerous phases in the operation of an AUV are when it is launched into the water and when it is recovered. Underwater power charging and data transfer can reduce the danger and improve operational efficiency.”
这是程序:当其电池需要充电时,AUV使用声学信号定位扩展坞。当它接近站时,光学地导航,并且车辆使用在AUV的一端发现的M形连接装置捕获对接站的杆。然后,使用光通信进行微调的车辆的位置,完成对接,并且功率充电和数据传输开始。使用非接触式电力传输系统进行充电,通过光通信完成数据传输。
演示原型AUV“坐”在车站上码头,但对于商业版,川崎完全逆转了概念,所以车站被悬挂在母舰上。哦,“通过将车站悬挂在船上”增加,“AUV可以与车站一起恢复或启动,因为AUV牢固地绑定到车站。这是一种更有效和更安全的机制,因为它不涉及潜水员或船只部署或恢复AUV。“
准确检查
通过机器人手臂 - 另一个
世界 - 首先通过
技术合作
车辆自主导航所需的控制技术主要由Kawasaki的企业技术部门开发。通过与苏格兰海螺瓦大学的合作开发了一种自动跟踪管道的方法,该方法以其对AUV的优秀研究而闻名。
该系统的另一个独特的发展是用于检查的机器人手臂,因为AUV配备有机器人臂检测装置是世界第一的。手臂迅速检测管道的状况,因此维护工作可以尽早开始。这导致完善的整体生产率和更长的资产寿命。
对于商业版本,手臂从AUV的底部延伸,在手臂的顶端有一个轮式底座,上面装有各种传感器用于检测。当底座前进时,底座的轮子在管子上滚动。
助理部门的AUV部门助理经理Kosuke Masuda解释说:“其他公司开发的许多AUV都从远处检查管道,这使得难以收集精确的数据。然而,机器人臂可以将传感器靠近管道放置并收集精确和准确的数据。“
当AUV由于潮汐电流而摇摆时,手臂吸收运动并继续稳定地操作。由于臂必须在表面下方3,000米的苛刻条件下起作用,所以如前所述,其设计远不易。
Masuda补充说:“我们将通过设计和建造潜水器开发的技术应用到AUV专用臂的机械和结构上。我们还得到了来自川崎精密机械和机器人公司的技术支持,以整合工业机器人的准确性和精度。商用水下机器人采用了川崎的尖端技术。”
公众游行称赞
油田开发商
商业AUV的性能测试目前在冲绳和AWAJI岛进行。使用上一代原型,我们于2017年11月在苏格兰进行了公开演示,邀请与海底石油工业相关的当地人员。
根据立即报道该事件的行业杂志,客人们对测试给予了很高的评价。他们的评论包括:“我印象深刻其高盘旋性能期间受到1 kt-class快速潮流,”“我发现系统紧凑,考虑到它的非接触式水下功率输出是5 kW-class,“和”是很重要的对于水下机器人有更多的应用程序,例如检查系统。我想和川崎更具体地谈谈。”
Okaya评论说:“谈到油田维护的未来,我们希望rov和auv的角色将更加明确地划分:rov将用于重型项目,如管道更换,auv将执行检查和其他非重型任务。”
在2021年,世界将看到第一个商业AUV任务,任务保护海底油田,从而支持全球能源使用。

期待明天
商业AUV实现更高
速度快,任务时间长
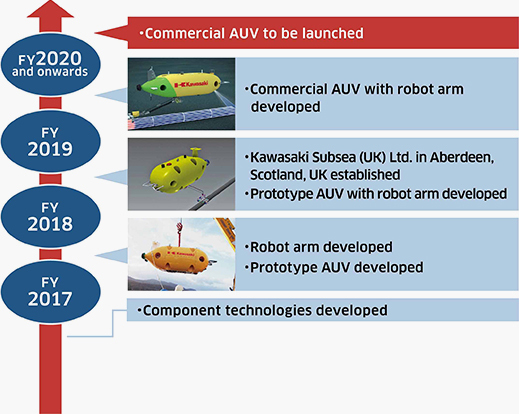
在验证了每个组件的技术后,川崎重工在2017财年开发了一个水下机器人原型,用于演示测试。与此同时,该公司正在从事一个独立的项目,以开发机器人手臂,该项目完成后,随后附加到原型水下机器人上,并于2018财年开始进行验证测试。测试结果被用于改进商业版本,结果是更加流线型的形状,显著更快的导航速度,和更长的任务时间-这些特征导致了商业auv所需的检查距离的急剧提高。
领导者的声音
Hiroshi Sakaue.
AUV部门高级经理
神户造船厂,船舶和离岸结构公司

创新技术悄然支持
来自海底的全球能源供应
几十年来,Kawasaki一直在建造Soryu级潜艇,深淹没救援车辆(DSRV)和其他潜艇。因此,我们多年来积累了丰富的水下业务技术。实际上,在我们在2003年完成AUV海洋鸟之前,我们已经建立了自动对接和无与伦比的能源供应的基本技术。
为了开发这一商业AUV,以及继续我们的研发努力,我们崇敬的组件技术解决各种挑战,包括提供能源,自主导航控制和水下通信。幸运的是,日本在2007年制定了“海洋政策的基本行法”,促进了海上的保护,并决定支持这些技术的发展。因此,我们的AUV的发展计划被补贴,允许我们继续研究未解决的挑战。
该计划支持我们的承诺不仅开发自动对接和非接触式电力传输技术,还可以通过机器人臂和自主导航控制算法进行的测量 - 这两个都是世界的第一成就。我们打算与客户合作,升级机器人手臂尖端的检验单元。我们还计划利用机器人ARM以超越海底管道的维护和检查,并希望看到其用于电力传输和控制信号传输的脐带,用于将电源转移到陆上设施的电源等。
2019年,我们在英国苏格兰阿伯丁(北海石油公司的中心城市)成立了Kawasaki Subsea (UK) Ltd. (KSUK),不仅专注于AUV的销售,还加强了我们收集关于AUV功能的客户需求信息的能力。在此基础上,我们计划在2021年向全球市场推出首个商用AUV。
由于世界对石油作为一种能源的需求仍然强劲,到深海开采石油的趋势将会加速。这意味着海底管道的长度将会延长,各种类型的控制设备将不得不在更恶劣的操作条件下发挥作用。我很自豪的是,我们可以向世界交付自动水下航行器,以支持全球能源需求——悄悄地,从海底。